 |
 |
 |
 |
CAMOSCA is invited, Stand in presence!!! Health Sector, Stand J.1.08 |
CAMOSCA a ChAir Moving On the Stairs Completely Automatically designed in Genoa, Italy by ing. Andrea Dogliotti andogliotti@yahoo.it +39 335 831 0655
|
CAMOSCA
VIDEOS ALONG THE STAIRS
A
Passenger From DESK to STAIRS, Goes Up,
then Down, Back to Desk. ACCELERATED.
TECHNICAL VIDEOS

Presentation
Genoa_2/12/2021
Powerpoint
and video (9')


|
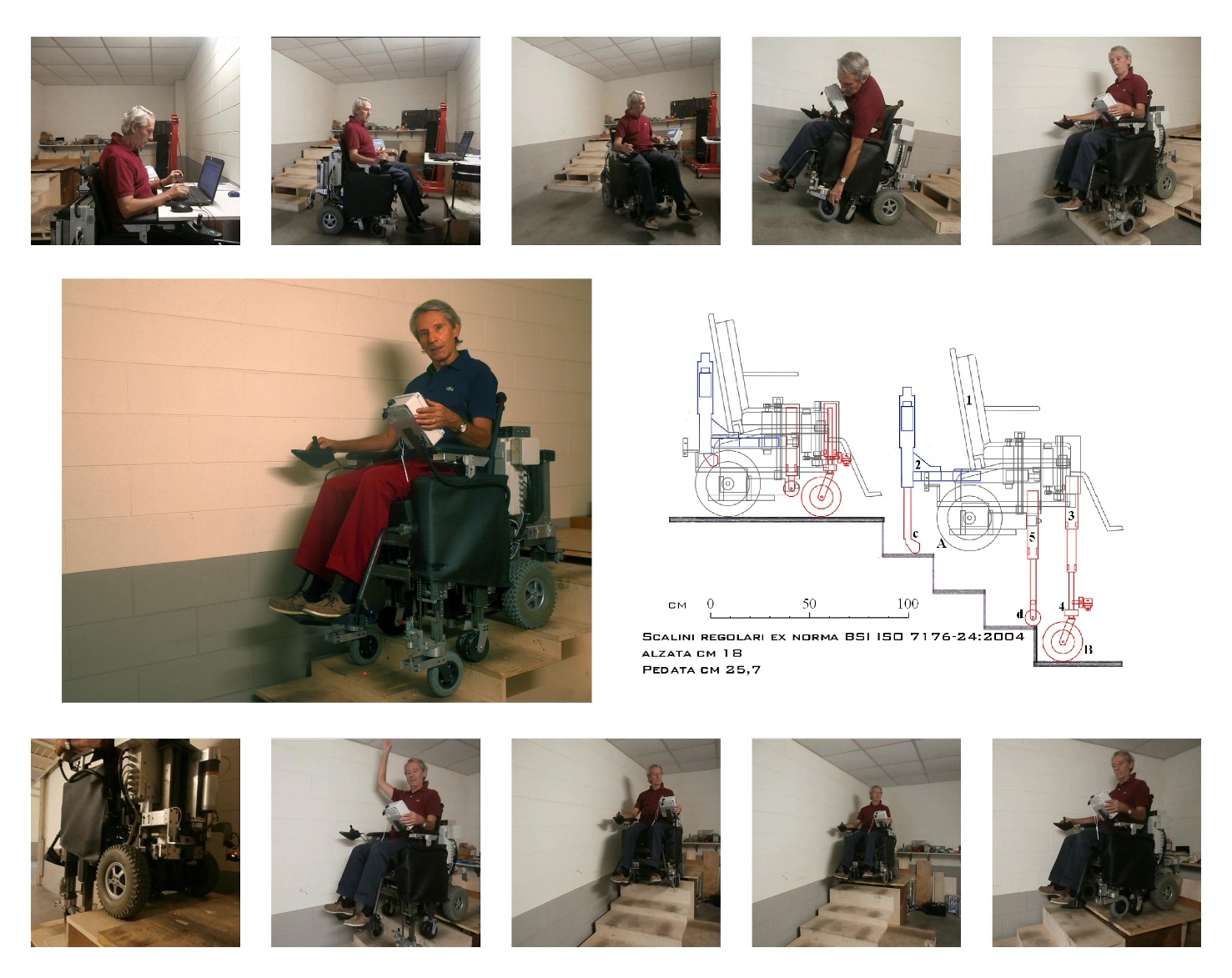
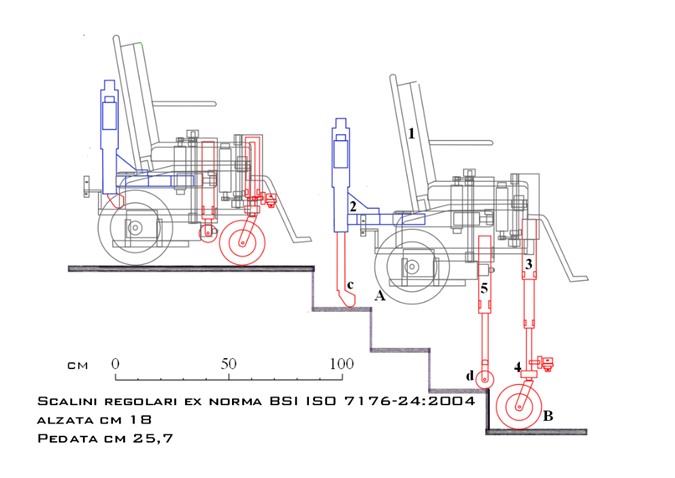
An electric wheelchair 1 from normal trade is integrated with:
All motors and sensors are electric, using the same
batteries normally installed on electric wheelchairs, with possible
upgrade in capacity. All positions and elongations are defined in
accord with well defined formulas, depending on the characteristics
both of the wheelchair and of the stair that it is intended to
afford.
When moving up and down the stairs, the front small wheels d and the rear foot
c alternate with respective wheels A and B in
sustaining the wheelchair, when the wheels meet the steps. The
frame 2 supporting foot c moves horizontally: it
extends when foot must lean on upper step with respect to wheel A,
it contracts when it must lean on the same step. Vertical
movements of A wheels, and thus of wheelchair’s body, come from
the movements of other wheels, telescopic cylinders and frames.
It is fully autonomous in managing
|